
热线电话
191-2198-6111

由驱动电路引起的步进电机的振动和噪声的原因如下。
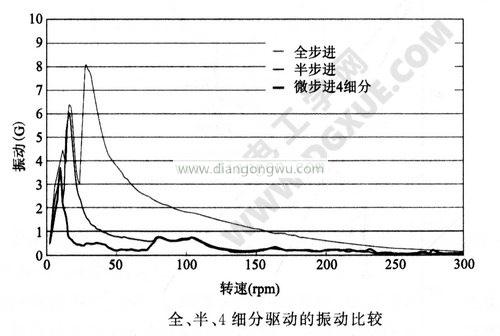
定子电流的谐波分量(在分段过程中生成)。相电流不平衡,尤其是在非恒定电流控制状态下。功率波动。励磁电流的波形。其中,(1)高谐波是主要原因。步进电机由方波电流驱动,方波电流不可避免地包含大量谐波,从而产生振动和噪声。因此,驱动电流优选是正弦波。接近正弦波的驱动方法是步进电机的子步进驱动。下图比较了四分之一,半步和全步驱动中电动机的振动,并且振动依次增大。
步进电机的振动和噪声是由步进电机的主体引起的,如下所示。
它是励磁电源的高次谐波分量。由于齿槽转矩和径向引力引起的转子变形而产生的振动和噪声。定子和端盖的刚度不够,是线圈和磁路的不平衡,以及机械结构的不对称。零件调整松散。线圈本身的位移。转子偏心或动平衡差。轴承预紧力不正确。还请考虑以下原因。
与已安装的机器和负载系统产生共鸣。传动系统(不平衡齿轮啮合等)。其中,减少与电动机相关的振动和噪声的有效方法是:
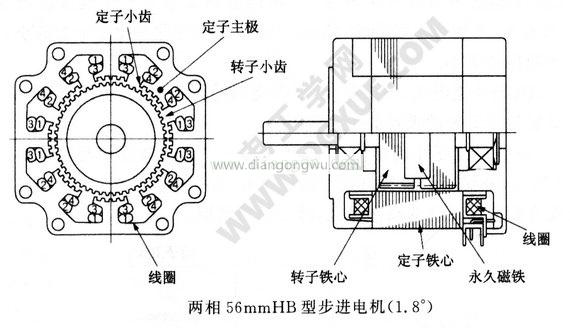
下图显示了2相56mmHB步进电机(1.8°)的结构。
转子的直径减小约10%,定子壳体的直径增大10%。如图所示,在提高了定子的刚度之后,与原始设计相比,振动和噪声得到了改善。以下。
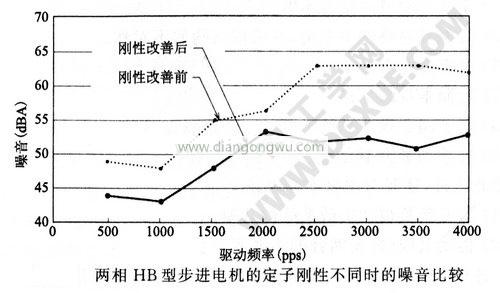
步进电动机中的噪声的主要原因是由高次谐波产生的电磁力,定子刚度不足,并且定子的主磁极被吸引到转子上,从而导致定子轻微变形。
上图显示了定子刚度与噪声之间的关系,并且定子的主极吸引转子,导致定子略微变形,从而产生噪声。如上所述(2相56mmHB型步进电机的结构图)2相HB型有8个主极。定子的主极数为2相为4、8、16,3相为3、6、9、12等。通常,主极越多,高速响应越好,低速转矩越低,线圈越小,振动和噪声越好。
下面以伺服步进电机(VR型步进电机)为例介绍减少振动和噪音的方法。定子的主极为3相6极或3相12极。通过分析由径向引起的振动,可以获得降噪解决方案,可以看到存在6个磁场变化。在6极12磁场中,它是12极,但是12极的变化量小于6极的变化,因此振动较小。
HB型步进电机具有更多的主极和更长的线圈绕组时间,因此成本更高,但是增加主极是减少振动和噪音的一种手段。
如下图所示,降低励磁磁通中高次谐波的一种有效方法是使转子齿相对于定子齿的螺距以不同的角度δ1,δ2等形成。通过不同角度的方法减小磁场。通过传递更高的谐波来降低齿槽转矩。
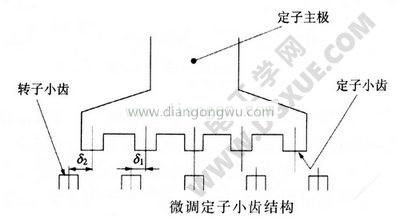
在两相电动机的情况下,齿槽转矩由四次谐波组成,这是一种主要考虑消除四次谐波的设计。定子和转子之间的齿距略有变化,从而减少了一些相互关联的磁通量,并减小了桨距角特性的峰值转矩。今天发售的两相步进电机,除特殊应用(如制动)外,通常采用微调距离或改变其形状和结构以减小齿槽转矩。
下图是两相步进电机的示例,并且齿槽转矩使俯仰角特性失真。两相电动机的齿槽转矩成为角度特性的四分之一周期,即四次谐波。定子电流和永磁体转子磁通之间的俯仰角特性的理论值是由虚线表示的正弦波,该正弦波叠加在由齿槽转矩产生并合成为失真的第四谐波上。粗线表示的转矩曲线角度特性发生畸变,产生非正弦波,从而导致定位精度差,振动和噪声增大。齿槽转矩的相位由定子和转子齿之间的相对位置关系确定。由于定子和转子齿的微小位置偏差,在每个齿中产生的四次谐波的相位可能会略有变化并相互抵消。这减小了小的齿槽转矩。
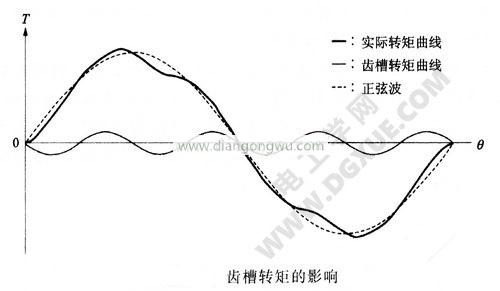
上图所示的微调方法(微调定子小齿结构),定子和转子齿的齿形以及相角δ的偏移是各个电机制造商的重点。日本伺服公司对以下内容进行了比较,但未进行微调或调整电动机特性。
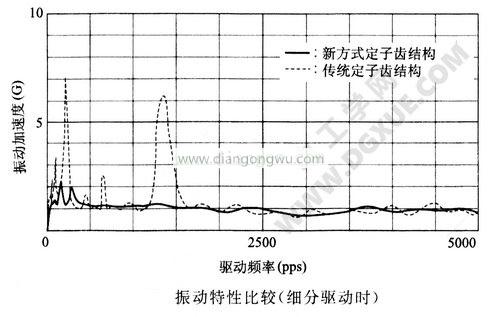
下图显示了带或不带微调细分驱动器的步进角为1.8°的两相步进电机的速度振动特性。如果不进行微调就细分和驱动电动机,则如虚线所示,在低速或中速区域可以看到振动的峰值,并且可以通过微调方法消除大部分振动。
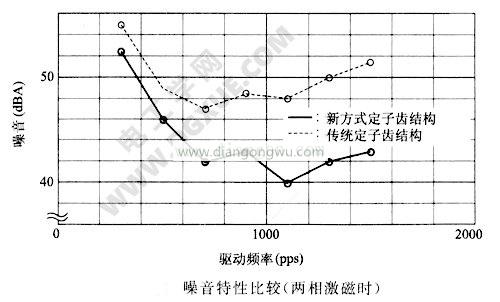
其次,比较两相励磁驱动模式下的两个电动机的速度噪声特性,如下图所示。作为比较的结果,您可以看到使用微调偏移方法时的噪声得到了极大的改善。电机转速越高,降噪效果越明显。
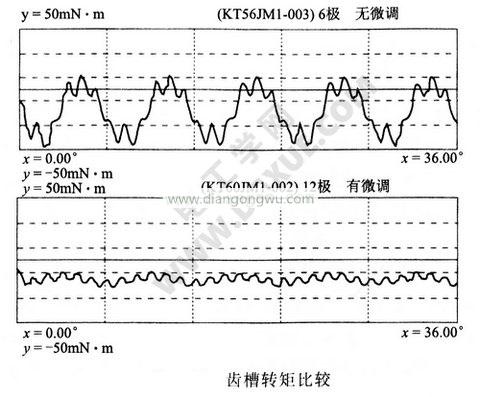
比较三相HB型步进电机,下图显示了带有或不带有微调补偿方法的特性曲线。上图显示了三相HB型1.2°,6个主极,齿槽转矩且无微调偏移。下图显示了三相HB型1.2°,12个主极,齿槽转矩。具有微调的补偿力矩。三相HB型步进电动机将电动机的齿槽转矩与相同的步距角进行比较,以比较具有更多固定激励,良好的微调偏移效果和12个主磁极1.2的产品的齿槽转矩。 °降低17.4%。
在机器上安装步进电机时,可以使用诸如硬质橡胶的减震材料来防止与底板的共振。该方法对降低噪声有明显的效果,并被广泛使用。有两种特定的方法,一种是用几毫米厚的硬质橡胶将步进电机的前面板安装起来,然后将其用作步进电机的前连接板。另一种是使用两个刨丝器。硬质橡胶被夹在步进电机和安装装置之间。这就是所谓的设备减震器,降噪效果明显,但是步进电机依靠安装基座来散热,橡胶材料的导热性很差,所以要注意电机温度的升高。
公司地址 : 上海市嘉定区宝安公路2999弄
公司邮箱 : 19121986111@163.com
公司电话 : 021-6992-5088
