
热线电话
191-2198-6111

交流伺服电动机是两相异步电动机。定子具有两相分布的绕组,电角度为90°。一相是励磁绕组f,另一相是控制绕组K,转子是笼子。当电动机运行时,励磁绕组f连接到单相交流电压Uf,控制绕组连接到控制信号电压UK,并且Uf和UK具有相同的频率。交流伺服电机必须具有与直流伺服电机相同的伺服特性。即,当控制信号电压强时,电动机速度高,而当控制信号电压弱时,电动机速度低。当信号电压为零时,电动机不应旋转。为了满足信号电压强时的高速和信号电压弱时的低速的要求,可以使电动机的气隙磁力接近信号电压强时的圆形旋转磁力。当信号电压弱时,电动机的椭圆率可以接近于脉冲磁力。如果所需的信号电压消失,即UK=0之后,则直到采取相应的技术措施才能使电动机旋转。
我知道当单相异步电动机的定子由单相绕组供电时,机械运动太高。
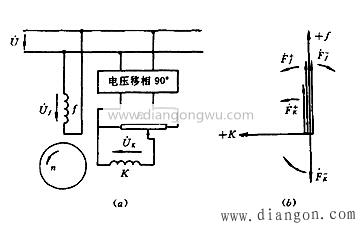
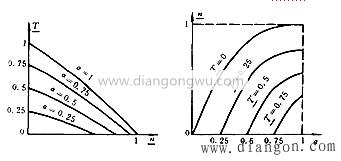
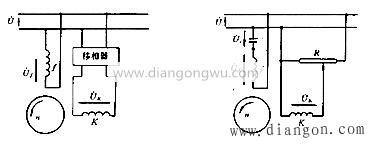
T=0,n=0)对称曲线,正向电磁转矩特性曲线T +=f(s),T +=Tm +,临界滑移率sm + <1,T-=f(s)T +=f(s),因此0 图1防止交流伺服电动机旋转 当正向磁力(或反向磁力)单独作用时,实际的交流伺服电机需要较大的sm。增大sm的方法是增大转子电路的电阻r2。由于sm∝r2,与普通的异步电动机相比,交流伺服电动机的转子电阻非常大。 在设计交流伺服电机时,当励磁绕组和控制绕组均被额定时(在控制绕组的情况下,额定电压代表控制电压),由两者产生的磁力大小绕组如下:也一样。当交流伺服电动机运行时,如果励磁绕组连接到相同大小和相位的额定电压,则改变施加到控制绕组的电压UK的大小和相位将跟随电动机气隙磁力。信号电压UK。它可以是圆形旋转磁力,另一椭圆率的椭圆旋转磁力或脉冲磁力。 (http://www.diangongwugwu.com/Copyright)并且由于气隙磁力的差异,电动机的机械性能也会相应地发生变化,因此驱动负载的交流伺服电动机的速度n也将发生相应的变化。这就是交流伺服电机使用控制信号电压UK的大小和相位变化来控制速度变化的原因。 通过更改UK的大小和相位来实现对交流伺服电机的控制。主要有三种控制方法:幅度控制,相位控制和幅度相位控制。 1.幅值理制 交流伺服电动机的速度由施加到控制绕组的信号电压的幅度控制,这种控制方法称为幅度控制。 振幅控制接线如图2所示。励磁绕组f直接连接到交流电源。电压是额定值。施加到控制绕组的电压为UK,其相位为励磁绕组电压的90°,在90°之后,您可以更改UK的大小。 UK的大小为UK=αUKn,UKn为控制绕组的额定电压,α为有效信号因子,α的值为1。如果是这样, UKn是默认常数,控制信号电压UK的标准单位值是α。即:英国/UKn=英国=α 图2交流伺服电机的电容值控制 (a)控制接线图(b)Ff力矩 如果有效信号系数α≠1,则控制绕组中的磁力振幅和励磁绕组中的磁力大小不相等,并且两个绕组之间的间距为90°电角。施加的电压和电流时间相差90。在电角度下,电动机的总空隙复合磁力为椭圆旋转磁力,空间磁力矢量图如图2(b)所示。在图中,Ff +和Ff-是分解成励磁绕组脉动磁力Ff的两个正负旋转磁力,而FK +和FK-是分解成控制绕组脉动磁力FK的两个正负旋转磁力。磁力;电机的正向磁力为F +=Ff ++ FK +,而反向磁力F-=Ff- + FK-是常见的情况。当α=1时,Ff=FK,F +=2 Ff +,F-=0。气隙磁力F=F +是圆形磁力α=0,FK=0,气隙磁力F=Ff +是脉动磁通,F +=F-=Ff/2,0 <α<1,F +=如果Ff ++ FK +,F-=Ff- + FK-,则为空隙中的椭圆磁力。 α值越小,椭圆率越大,越接近脉动磁力。 使用相同的方法对两相绕组通电时的单相异步电动机的两相绕组进行分析,正向和反向磁力分别产生电磁转矩T +和T-,以及总的电磁转矩。扭矩。 T=T ++ T-。后,如图3(a)所示,当有效信号系数α不同时,可以获得相应的机械气氛。在该图中,电磁转矩和速度均以单位值,旋转数显示 当α=1时,力矩的默认值是电动机的启动转矩,而速度的默认值是同步速度n1。机械性能不是直的。从图1-35的机械性能可以看出,当有效信号系数α=1时,气隙磁力是圆形磁力,F-=0,T-=0,并且是电磁转矩。在特定速度下,T=T + Max。当α<1时,正向磁力F +减小,并且T +显示出反向磁力F-,并且T-≠0,小于在一定速度下电磁转矩T=T ++ T-时的α=1。当α=0时,正向磁力F +和反向磁力F-具有相同的大小,并且机械特性T=f(s)示于图1=33。在图1-35(a)中,交叉源不在象限中。同时,当α=1时,理想空载速度为同步速度n0;当α<1时,由于存在T-,理想空载速度为n0,等于单相异步电动机。 α越小,理想的空载速度越低。在机械特性上,在0 <α<1的整个范围内,单位起动转矩TS=α的值。 如图3(b)所示,也可以从机械特性中获得交流伺服电动机振幅控制的调节特性。在幅度控制中,调谐特性也不是直线,而当n小时,仅近似直线。为了通过在尽可能小的区域n中利用交流伺服电动机的调谐特性来减少伺服系统的动态误差,许多交流伺服电动机都使用频率为400 Hz的交流电源。增加同步速度n0。与直流伺服电动机类似,调节特性和交叉泵相交处的有效信号系数α的值是启动电压每单位值的标准值,当转矩大时,启动电压就高,并且起动电压和转矩都是单位值的标准值,并且值是相同的。 (a)机械性能(b)调节性能 图3振幅控制过程中的机械特性和调节特性 在特定的控制信号电压下,交流伺服电动机的输出功率P2=T2Ω≈TΩ非常小Ω,因此当转速非常低时,输出功率P2也非常小。因为当速度接近时,T很小,输出很小。 α越大,输出功率越大。当α=1时,通常将交流伺服电机的额定功率指定为输出功率。此时,对应的速度是额定速度,对应的输出转矩是与普通电动机不同的额定转矩。 … 2.相位控制 通过施加到控制绕组的信号电压的相位来控制AC伺服电动机的速度的控制方法称为相位控制。相位控制接线如图4所示。励磁绕组连接到交流电源,幅值是额定电压,施加到控制绕组的信号电压是额定值,但是可以改变相位。 Uf和Uk具有相同的频率,两者之间的相位差为β,β=0-90°。例如,Uk落后于Uf。这样,sinβ=0到1,sinβ称为相位控制的信号系数。 图4相位控制图5幅度相位控制 3.幅值-相位控制 交流伺服电机振幅相位控制接线如图5所示。在这里,我们将电容器连接到绕组的外部,然后再连接到交流电源,控制电压为Uk,其频率和相位与电源电压相同。您可以更改大小。 当改变具有相位控制和幅度相位控制的交流伺服电动机的控制信号时,电动机的合成磁力的特性或椭圆度也会发生变化,因此机械性能会有所不同,从而使电动机看起来像一个伺服器。这两种控制方法的机械和协调特性类似于振幅控制,是非线性的,并且当单位速度较小时具有良好的线性。 因为幅度相位控制电路很简单,所以输出功率更大并且使用更多。 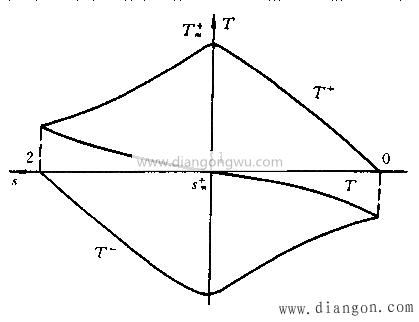
公司地址 : 上海市嘉定区宝安公路2999弄
公司邮箱 : 19121986111@163.com
公司电话 : 021-6992-5088
